基于STM32F103RCT6的AD9833驱动开发(代码可以免费发邮箱) |
您所在的位置:网站首页 › Ad9851 stm32HAL 波形输出 › 基于STM32F103RCT6的AD9833驱动开发(代码可以免费发邮箱) |
基于STM32F103RCT6的AD9833驱动开发(代码可以免费发邮箱)
|
基于STM32F103RCT6的AD9833驱动开发(代码可以免费发邮箱)
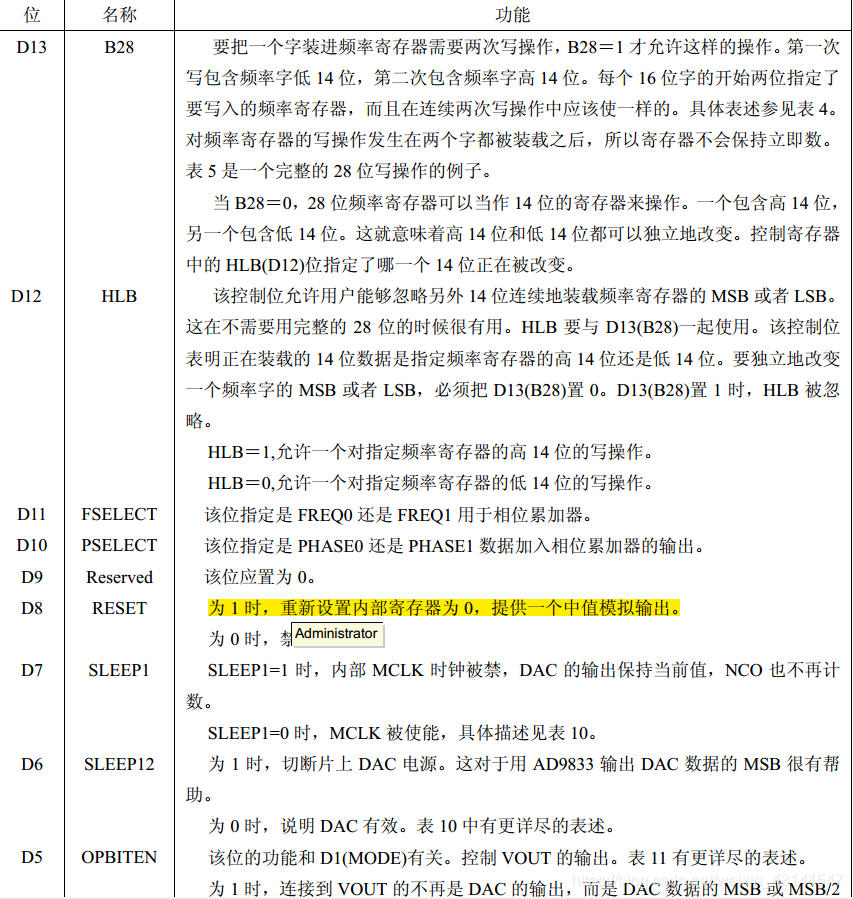
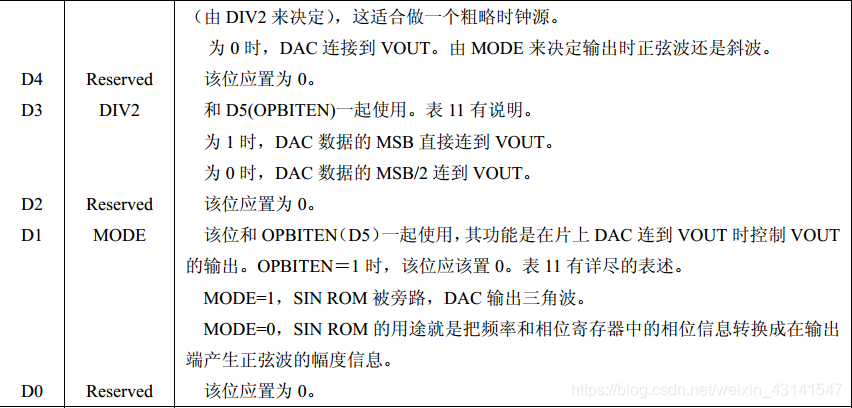
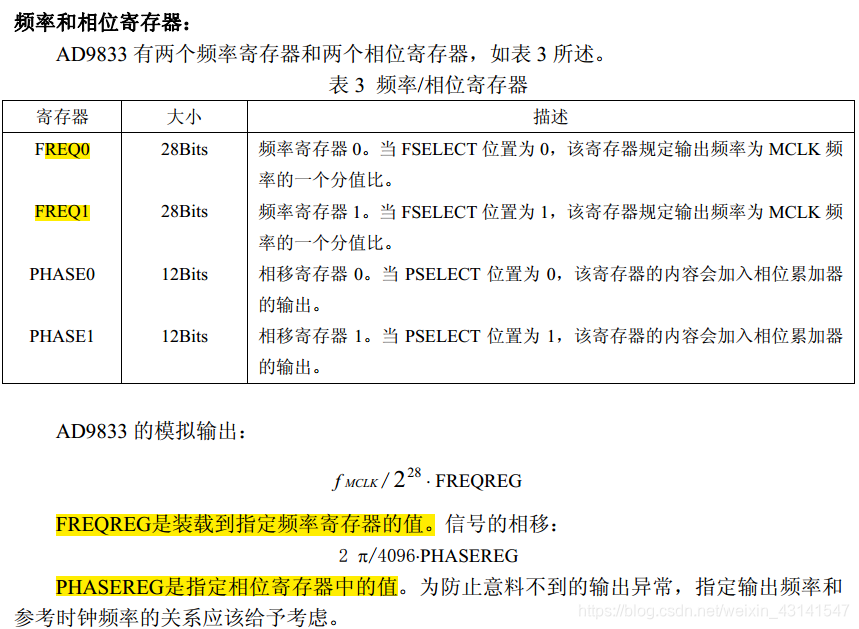
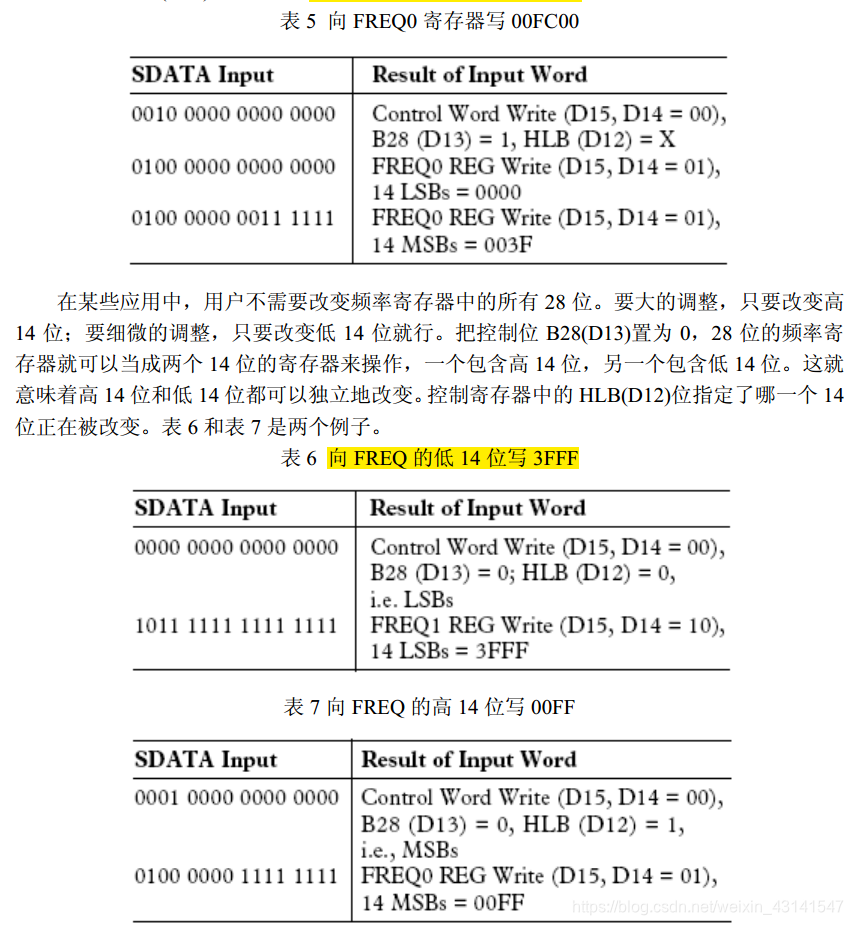
AD9833手册分析
手册就先讲到这里,不明白的欢迎评论区留言,另外我会把代码还有手册一并发送给感兴趣的朋友。 AD9833典型应用电路(亲测有效,可以直接拿走)
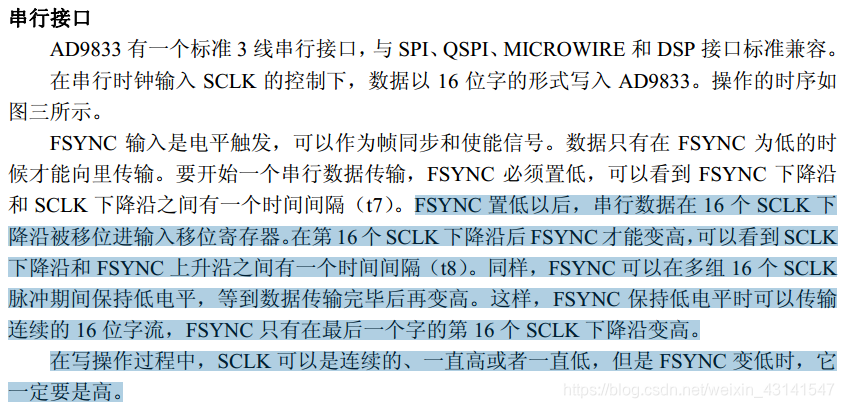
spi时序图: 我用的是SPI2,假如你打算用SPI1的话,只需要配置一下IO,然后最重要的是SPI时钟千万别挂载错了,RCC_APB1PeriphClockCmd( RCC_APB1Periph_SPI2, ENABLE );改为RCC_APB2PeriphClockCmd( RCC_APB2Periph_SPI2, ENABLE ); 而且一定要明白NSS管脚含义,AD9833要求写之前有一个拉低的过程,弄明白NSS信号软硬件管理到底什么含义,这里我推荐用软件管理模式,有内部信号接管,(这时候你就不用管主机的NSS了),这时候STM32的NSS管脚可以当普通IO使用,不过要手动拉高拉低NSS管脚(可以参考AD9833写操作时序)小遍在这里给大家安利一篇博客,这一部分说的比较详细。 https://blog.csdn.net/otto1230/article/details/100122559 SPI读写功能 u8 SPI2_ReadWriteByte(u8 TxData) { u8 retry=0; while (SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_TXE) == RESET) //检查指定的SPI标志位设置与否:发送缓存空标志位 { retry++; if(retry>200)return 0; } SPI_I2S_SendData(SPI2, TxData); //通过外设SPIx发送一个数据 retry=0; while (SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_RXNE) == RESET)//检查指定的SPI标志位设置与否:接受缓存非空标志位 { retry++; if(retry>200)return 0; } return SPI_I2S_ReceiveData(SPI2); //返回通过SPIx最近接收的数据 }一定一定要用这个函数,小遍在这吃过亏,一定要一读一写,否则可能出现写不进去的情况。反正强调一点,不管用SPI做什么,相信我老铁,没毛病。用这个读写函数一点问题都没有。 AD9833驱动代码(重点来了)下面是头文件标注 ad9833.h #ifndef _AD9833_H_ #define _AD9833_H_ /******************************************************************************/ /* Include Files */ /******************************************************************************/ #include "sys.h" #define AD9833_FSYNC PBout(12)//这个是NSS管脚 /******************************************************************************/ /* AD9833 */ /******************************************************************************/ /* Registers */ #define AD9833_REG_CMD (0 |
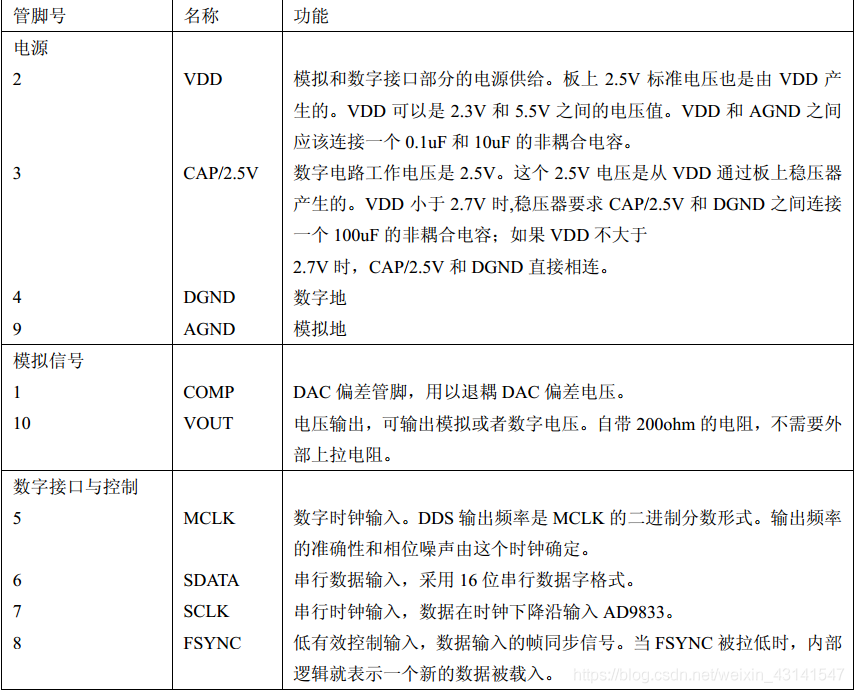 管脚定义:
管脚定义: 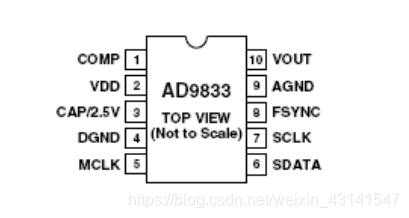
 注意晶振是有源晶振。
注意晶振是有源晶振。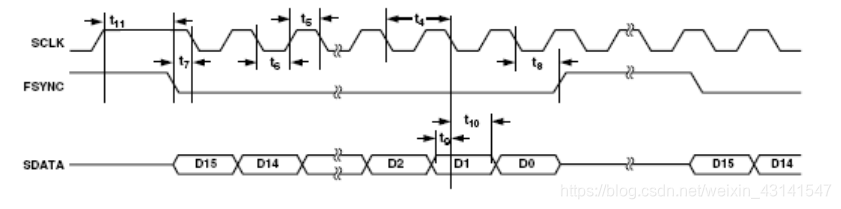
【本文地址】
今日新闻 |
推荐新闻 |